No products






L298N Dual Motor Driver
0104110000001061
New product
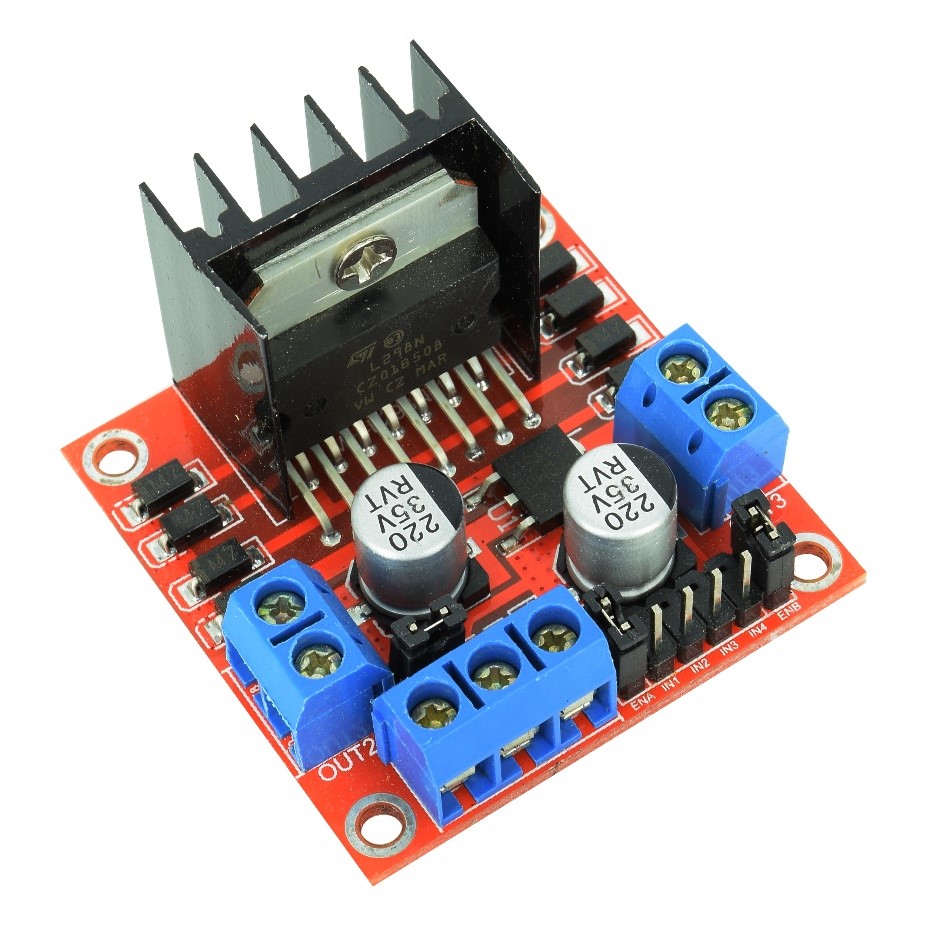
This motor driver module uses the popular L298N integrated circuit, which contains two H-bridges, capable of currents up to 2 A each.
See Description for more details about the product.
Add to cart now!
47 Items
More info
Overview
This motor driver module uses the popular L298N integrated circuit, which contains two H-bridges, capable of currents up to 2 A each. This module can be controlled by standard TTL logic and it works with a wide range of input voltages, making it ideal for robots and other high power projects. This module is capable to drive 2 DC motors independently or a single 4 phase stepper motor.
L298N is a high-voltage, high-current motor drive chip produced by ST. The chip uses a 15-pin package. The main features are: high working voltage, the highest working voltage can reach 46V; the output current is large, the instantaneous peak current can reach 3A, the continuous working current is 2A; the rated power is 25W. A high-voltage and high-current full-bridge driver with two H-bridges, which can be used to drive inductive loads such as DC motors, stepping motors, relay coils, etc.; standard logic level signal control; with two enable control terminals, Allow or prohibit the device to work without being affected by the input signal. There is a logic power input terminal to make the internal logic circuit work at low voltage; it can be connected with an external detection resistor to feed back the change to the control circuit. Using the L298N chip to drive the motor, the chip can drive a two-phase stepper motor or a four-phase stepper motor, or two DC motors.
Specifications
- Dual H-Bridge Driver
- Logic Supply Voltage: 5 V
- Motor Supply Voltage: 5 V to 35 V
- Logic Current: 0 mA to 36 mA
- Output Current: Up to 2 A each
- Storage Temperature: -20° C to 135° C
- Maximum Power: 25 W
- Size:43 x 43 x 27mm
Features
- This module uses ST's L298N as the main driving chip, which has the characteristics of strong driving ability, low heat generation and strong anti-interference ability.
- This module can use the built-in 78M05 to work through the drive power supply, but in order to avoid damage to the voltage regulator chip, when using a drive voltage greater than 12V, please use an external 5V logic power supply.
- This module uses large-capacity filter capacitors and freewheeling protection diodes to improve reliability.
Use with Arduino
Connections
• Out 1: Motor terminal A
• Out 2: Motor terminal A
• Out 3: Motor terminal B
• Out 4: Motor terminal B
• 5 V: 5 V input (if the source used is 7-35 V can be used as 5 V)
• EnA: PWM for motor A -
EnB speed control : PWM for motor B - Pini speed control for speed and direction control:
• In1: motor direction A
• In2: motor A
• In3: motor B
• In4: engine direction B
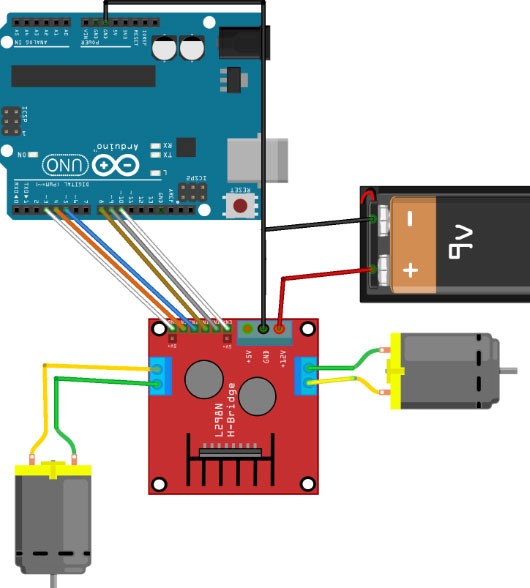
To control the DC motors with the L298N driver, we ensure that the EnA and EnB pins are not connected to 5 V. We will connect them to PWM pins 3 and 10 to control the engine speed.
To control the direction of the engines: on In1 we write HIGH, and on In2 we write LOW and the engine will go forward. To reverse the meaning we write LOW, respectively HIGH on In1, In2. Similar to the B engine.
Also, the GND of the driver must be connected with the GND of the Arduino board to work.
Don't delay, buy today.
Add to cart now!
Reviews
Five Stars
They came fully assembled, well designed and fully functional product. Does what is supposed to do.
Works as intended
Can control multiple motors and even control the speed.
Great motor controller
Compact, reliable and easy to use.
Quality product
Very useful when working on a reverse wheel system (i.e. reversing the wheel of an rc car), Simple system, and very affordable and efficient.
Works nicely.
Works perfectly on my little robot I'm building. Took me some time to figure it out. But was able to find lots of good tutorials and documentation online for it.
Great product, price, and delivery.
This is my first time using this board and it was very simple. It made it so easy to control a couple of DC motors with an Arduino that it was well worth the money (which was not a lot to begin with). Product arrived quickly also. Highly recommended.
Easy to wire
I purchased this Motor controller for my raspberry pi robot product. Easy to wire, small enough to mount anywhere. It's been almost a year now since my build and it is still working great.
Exactly what I needed
Using it for a project I'm working on. Works great so far. Does get pretty hot when pushing a stepper. I used fan for cooling. Plenty of online documentation for setup
Works great!
Very easy and self explanatory to use. Perfect for driving the motors for a robot.
Perfect I might need a couple more
Three board works and stood up to travel. Solid piece.
If you want to control two DC motors the L289N is the way to go!
Does exactly what it is supposed to do. Great product. Several articles and videos available online to help use it.
Five Stars
Excellent product, just as described, good quality.
Great little motor driver
Excellent motor drivers for small robots. Very reliable and easy to use. I've bought 4 and none have failed for any reason. Used with 4S lipo and no issues.
Customers who bought this product also bought:
-

Battery...
This Battery Capacity Tester with External Load...
₱199.00
-

15 cm 40p...
Ideal wires for making connections between...
₱89.00
-

Gear, Pulley...
Gear, Pulley and Belt Set
₱129.00
-

KCD1-11-2P...
The KCD1-11-2P rocker switch is basically used...
₱6.00
-

HC-SR505...
This HC-SR505 is a passive infrared motion...
₱44.00
-

DS04-NFC...
This is a continuous rotation servo motor with...
₱184.00
-
Charge...
Charge Controller Module for Batteries 12-24 V...
₱146.00
-

Active...
This is a small buzzer module which operates...
₱48.00
-

30 cm USB...
30 cm USB AM-B Mini Blue Cable for Arduino Nano...
₱35.00
-

12 V Relay...
This module has advanced timing chip control...
₱199.00
